


上一篇
空載透水光達測深

最新消息
News
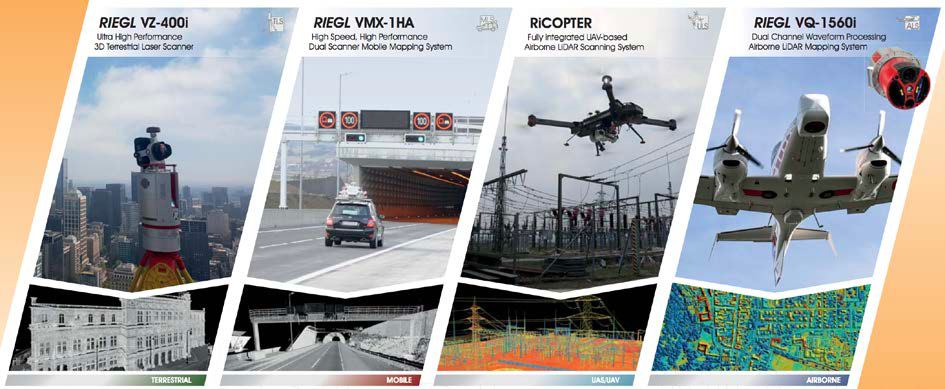
RIEGL光達產品線涵蓋地面、移動、UAV以及空載雷射掃描的廣泛應用。 RIEGL所有光達引擎和系統均基於RIEGL的Waveform-LiDAR技術,而與市場上其他光達產品有所區別、獨樹一幟。
RIEGL Waveform-LiDAR儀器和系統的主要應用領域。
Waveform-LiDAR具有兩個主要功能:首先,脈衝飛行時間(TOF)光達的返回訊號(從光學狀態轉換為電狀態之後)由具有高採樣率的類比數位轉換器(ADC)進行數位化,同時涵蓋廣泛的動態範圍。其次,對數位化的回波訊號進行詳細分析(訊號偵測和訊號估計),在線或離線,提供特徵豐富的測距結果,包含目標的精確距離,訊號強度和從接收到的回波訊號的實際波形得到的特性。結合角度測量並集成GNSS/IMU系統的移動式光達應用,所生成的3D點雲不僅具有幾何形狀,而且還具備已校準的振幅和反射率估計值之類的屬性,這些屬性簡化了諸如對位、地理定位、和過濾的進階處理程序。
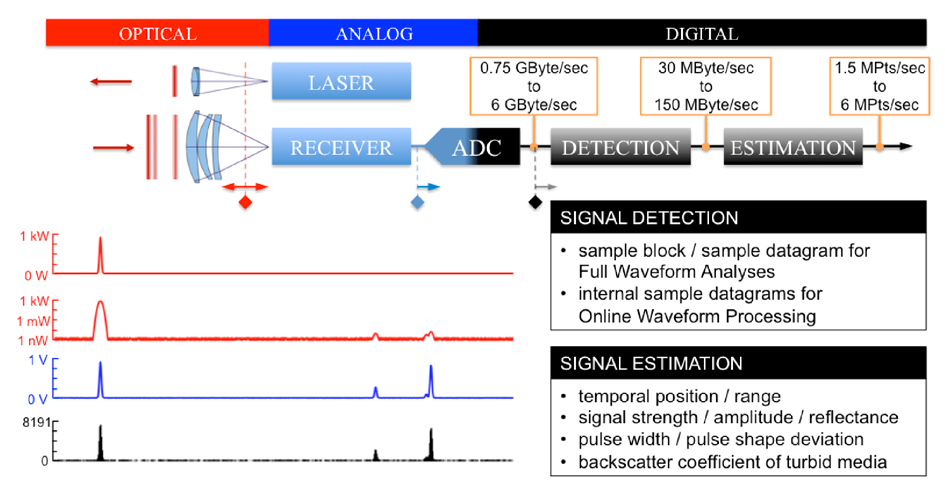
RIEGL Waveform-LiDAR儀器的測距儀之部分的系統方塊圖和訊號。
自從 RIEGL 於2004年在空載光達領域推出Waveform-LiDAR RIEGL LMS Q560以來,該設備以100 kHz的脈衝頻率(PRR, Pulse Repetition Rate) 運行,多年來,測量速度一直在增長。最初,Waveform-LiDAR係基於記錄波形並在所謂的全波形分析中離線分析這些波形。在2008年 RIEGL 推出了第一款用於地面雷射掃描(TLS)領域的Waveform-LiDAR,即 RIEGL VZ-400,它具有即時波形處理功能,量測速度高達300 kHz。同時,在地面雷射掃描儀,脈衝頻率已提高到1200 kHz脈衝頻率,空載光達的掃描脈衝頻率也已提高到4000 kHz。
不斷提高的量測速度帶來了挑戰:尤其是在空載光達系統測距較長的情況下,回波訊號會在下一個雷射脈衝發出後, 經過一段時間才到達。因此,多個雷射脈衝同時發射時,必須應用特殊技術來解決由這種多週期回波(multiple-time-around ,MTA)效應造成的未定值(Ambiguities)。再者, RIEGL的Waveform-LiDAR對所有回波訊號進行連續數位化,可以基於軟體自動解算這些雷射測距的未定值,這也得益於Waveform-LiDAR校準過的振幅訊息。未定值的自動解算極大地簡化了空載和無人機載光達掃描的飛行計劃,因為測區目標不必全部位於一個MTA區域中。MTA功能也使得地面光達能採集密集點雲資料,儘管地面的目標可能會佔據整個測距。
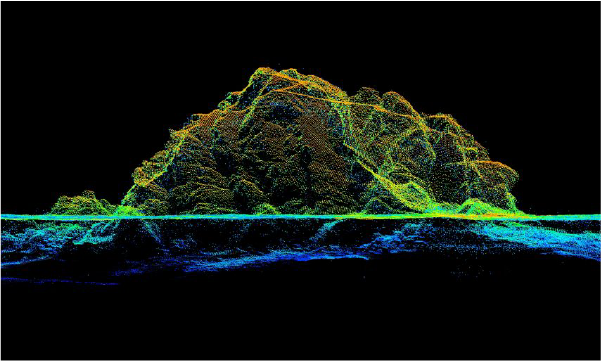
在空載光達測量中,速度至關重要。借助最近推出的 RIEGL VQ-1560i,這是一個雙光達引擎Waveform-LiDAR系統,其脈衝頻率是2000 kHz,以每平方米8點的密度,掃描面積覆蓋率可達每小時450平方公里。同時,該系統仍具有所有優勢,例如出色的樹葉間隙穿透力(請參考下圖),寬動態範圍,可在一次掃描中測量具有大,小雷射雷達橫截面的目標,並具有很高的精度和準確性。該系統還提供雙波長版本 RIEGL VQ-1560i-DW,它使用了波長1064 nm的近紅外和532 nm的綠光雷射。
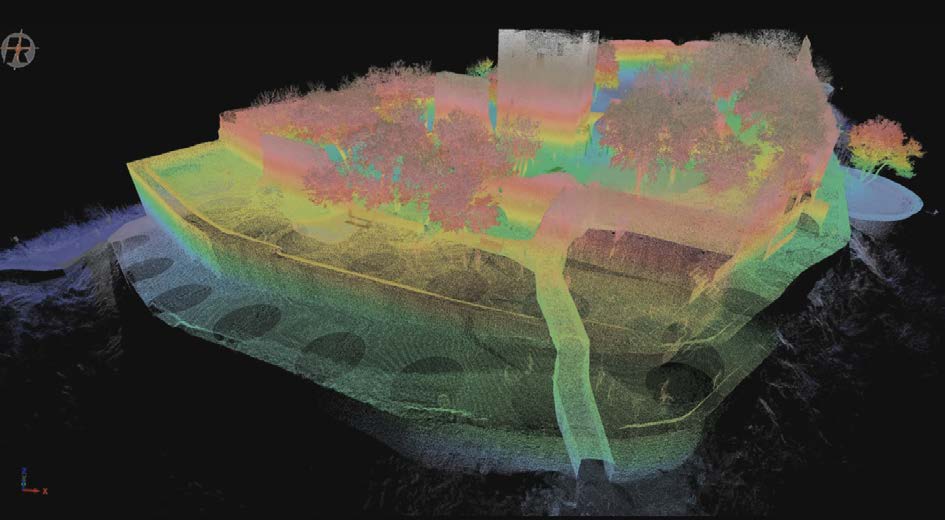
來自RIEGL的空載光達數據的示例:點雲的顏色根據相對於地面的高度而定,包括所有的點。
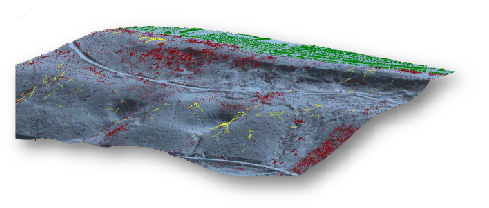
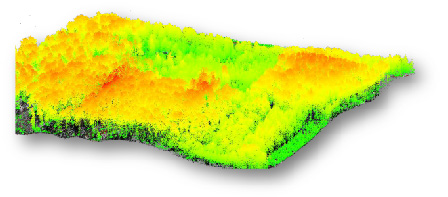
來自RIEGL的空載光達數據的示例:去除了植被中的點。數據分為地面點(灰色),枯木(黃色),低植被(紅色和綠色)。
訊號處理電子技術的進步實現了Waveform-LiDAR儀器和系統的小型化。一個非常突出的例子是 RIEGL 於2014年推出VUX-1系列,該系列是特別設計於無人機(UAV)使用。它的設計小巧、堅固且小於3.5Kg, 提供Waveform-LiDAR的測量能力,測量速度高達1000 kHz。 2016年推出了更為緊湊的Waveform-LiDAR儀器,即 RIEGL miniVUX-1UAV(僅1.55Kg),這是最小的光達,可提供市場上測量級精度且特徵豐富的點雲。同年,推出了 RIEGL BDF-1,第一個小型測深光達,該設備可在小型無人機上安裝操作。再者, RIEGL的 Waveform-LiDAR技術與先進的波形處理算法共同實現了在淺水中的測距,深度甚至超過了1.5倍沙氏盤深度(“Secchi Depth, 水能見度”)。
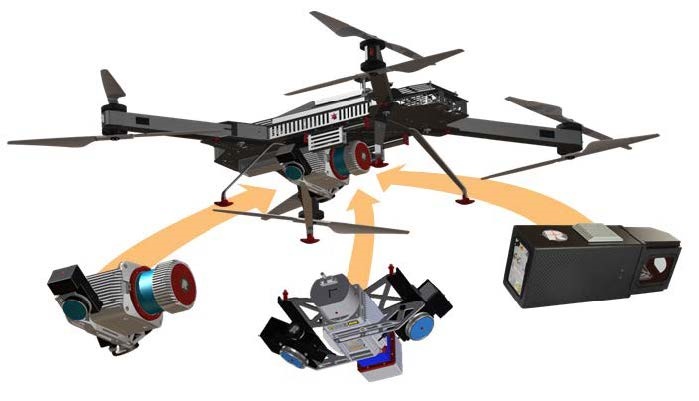
從左至右: RIEGL VUX-1UAV光達(相機選配), RIEGL miniVUX-1UAV(相機選配)和測深光達 RIEGL BDF-1。體積小巧輕便,可安裝在無人機上進行數據採集。
所有RIEGL光達儀器皆提供的基於波形之反射率估計值,可以提高RIEGL地面光達數據自動拼接的性能和可靠性, 目前已使用於RIEGL VZ-400i,該項新功能可直接在儀器本身上運行, 於掃描現場進行站點拼接。
由於反射率估計值會產生目標本身無關距離的屬性, 如不同物體對雷射波長的反射率, 來自不同位置和方向的掃描數據的相似性被有效地用於拼接。搭配集成的GNSS接收器,可以立即對掃描數據進行高精度地理地位(請參見下圖)。
RIEGL VZ-400i 掃描180站後自動拼接之點雲資料,包含有GNSS定位區域和無GNSS覆蓋的區域(影像中央前方的隧道)。
