上一篇
NV5和美國地質調查局(USGS)發布 Palisades火災和Eaton火災燃燒區的高解析度LiDAR資料

案例分享
Cases
By Grzegorz Szalast, Marta Sieczkiewicz • August 19, 2024
由於波羅的海的特殊性,在沿海地區進行精確測量並非易事。在過去的十年裡,除了使用GNSS RTK接收儀進行剖面測量外,地形雷射掃描儀也被用於定期監測波蘭南部的海岸。本文概述了驗證空載光達測深技術(Airborne Lidar Bathymetry, ALB)在海底和陸地上使用的可行性和準確性。
波羅的海南部海岸具有高度的變化性。由於風暴的影響,某些地區的沙灘變得越來越寬,而在其他地方沙灘則逐漸消失。為了防止這些現象,必須持續監測其變化並及時做出應對。對海岸狀況進行年度監測是法定義務,由波蘭海事辦公室主責。
近十年來,斯塞新(Szczecin)海事辦公室和格丁尼亞(Gdynia)海事辦公室委託使用空載光達進行空中掃描。地形空載光達在追踪陸地變化方面無與倫比,它們能以高準確度繪製整個海岸線。然而,一般空載光達使用的近紅外光雷射脈衝無法穿透水體,這導致對沿海地區缺乏完整資訊。此外,這些資訊也無法從高度剖面圖中獲得。理論上,解決此問題的方法之一是使用空載測深光達,但是,在像波羅的海這樣複雜的水體中,這種測量設備所達到的結果是否能夠滿足預期的準確性呢?
波羅的海的挑戰
由於波羅的海的特殊性,在波羅的海沿海地區進行測量並非易事。每種測量方法都有其優勢和局限性,但在這片水域中,它們的影響尤為顯著。例如,由於波羅的海是一個陸棚海(shelf sea),因此使用多波束測深儀測繪沿海地區的海底地形特別困難。水文測量船通常吃水較深,因此無法使用這些船隻進行測量。另一方面,使用吃水較淺的測量船則需要在接近理想的天氣條件下進行測量,否則,波羅的海的波浪可能會導致船隻傾覆。
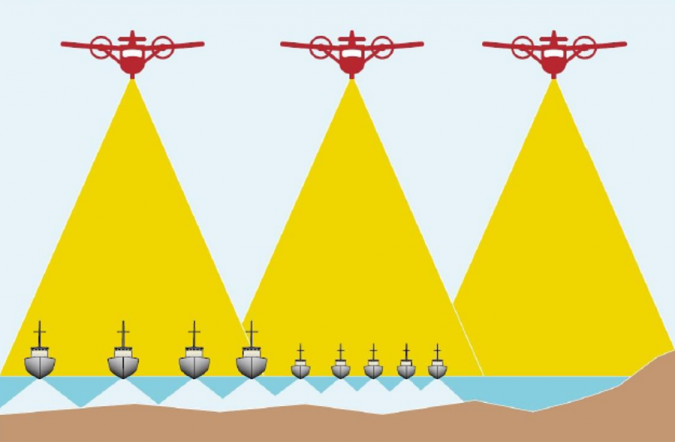
圖 1-多波束測深儀與ALB測繪能力的比較。(圖片來源:見下方)
因此,測量波羅的海南部沿海地區最常見的方法是使用GNSS接收儀進行剖面測量。測量員的任務是製作橫斷面剖面圖,對沙丘、海灘以及水中盡可能深的部分進行測量。這項技術毫無疑問地滿足了執行小範圍測量的需求,因其極具機動性且不受天氣條件的影響。然而,波羅的海可能出現的大浪仍然是一個問題。
水體透明度低
空載測深光達被公認為是測繪山區湖泊或清澈海洋和海域的理想工具。事實上,許多供應商的宣傳材料都誇大其辭,宣稱他們的掃描儀能夠在清澈的水中達到數十米的深度。然而,波羅的海顯然不屬於這一類型,這是一個水體相對混濁的海域。
另一個影響測深光達的因素是波浪作用。波羅的海可能會出現波濤洶湧的情況,其波浪頻率可能比海洋水域高得多。這一切都使測量變得困難,但並非不可能。關鍵是要對環境有充分的了解,並不斷追蹤空中和水中的變化條件。
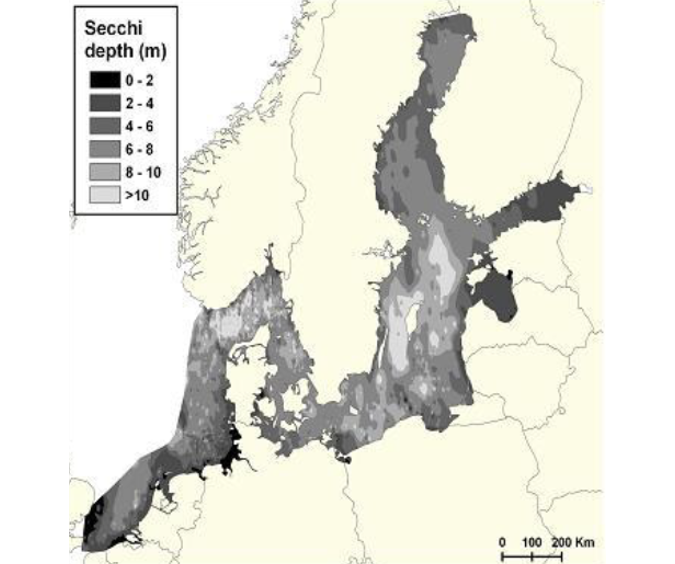
圖 2-基於1990-2005年數據的平均年度沙奇盤深度(Secchi Disc Depths)。(圖片來源:Lindgren和Håkanson,2007)
測試空載測深光達(ALB)的可行性
另一個影響特定測量方法普及性的因素是其可靠性。已經存在數十年並且廣為人知的技術,與那些相對較新的小眾方法被對待的方式不同。儘管如此,值得注意的是,早在2007年,就已經開始嘗試使用空載測深光達測繪波羅的海南部海岸。不幸的是,當時獲得的資料成果與其高昂的成本並不相稱。
這一趨勢在最近幾年開始有所改變,當時波蘭海岸選定區段的監測公共合約開始出現。GISPRO SA公司在這方面進行了一個先導計畫,該專案是受斯塞新海事辦公室的委託進行的。此工作的目的是驗證在波羅的海海岸使用空載測深光達的可行性,更重要的是,驗證使用空載測深光達在海底和陸地上進行測量的準確性。
技術條件與設備
測量剖面需要從沙丘/懸崖頂部開始每隔至少200米,橫跨沙灘和海岸線下方,延伸至海中500米(從海岸線起)。剖面測量需要每5-10米進行一次,並在特徵位置進行。測量過程需持續進行,使用GNSS RTK接收儀在陸地和淺水區,並在水中使用單波束測深儀。空載掃描需涵蓋整條10.4公里的海岸線,包括陸地表面和海底,最後回波的點密度不低於6點/平方公尺。
此計畫選用Riegl VQ-880-G II空載地形及測深兩用光達,它發射綠光(532nm)和近紅外光(1,064nm)範圍的雷射脈衝。他整合了PhaseOne iXM-100相機,並配備了先進的Trimble Applanix AV-610 GNSS定位系統和高階的IMU-57慣性單元。單波束測深儀(SBES)SonarMite BTX整合了Trimble R8 GNSS RTK接收儀,安裝在一艘輕型測量船上。陸地和淺水區的剖面測量則是使用了Trimble R12 GNSS RTK 接收儀。
測量活動與成果
本案件在2022年10月30日在良好的天氣條件下進行測量。當時天空多雲,但沒有降水,風速僅為1米/秒。VQ-880-G II在離地530米的飛行高度進行,飛行速度為100節。
成果的點雲最低密度為6.42點/平方米。使用SBES的測量是在使用校準桿進行校準後完成的。經過聲速剖面測量(SVP),水中的平均聲速確認為1,465米/秒。資料處理後,生成了包括GNSS RTK接收儀和SBES所測量剖面的照片草圖、RGB CIR正射影像,以及涵蓋沿海地區和水下部分的地理參考點雲。
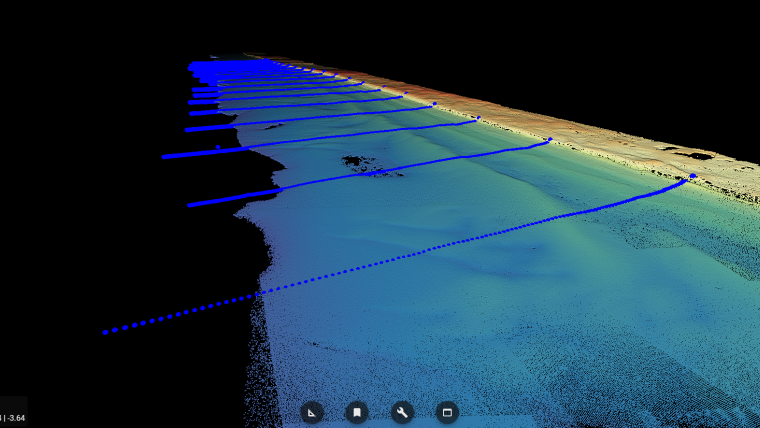
圖 3- GNSS RTK-SBES高程剖面的空載測深光達點雲。(圖片來源:GISPRO SA)
評估空載測深光達的準確性
此次測試的一部分是對使用不同技術進行的測量準確性進行驗證。為此,在對來自測深掃描儀的點雲進行分類後,製作了數值地形模型(digital terrain model)和數值海底模型(digital bottom model)。接著將在陸地上使用GNSS接收儀測量的點以及使用GNSS和單波束測深儀測量的點疊合到這些模型表面上。透過這種方式,使用不同測量技術獲得了相同點的高程坐標。因此,可以比較這些測量技術所獲得的數值(見表1)。
|
1. 比較單波束測深儀和測深雷射掃描的數值: |
|
|
取樣數 |
1,811 |
|
平均∆H |
0.059[m] |
|
標準差∆H |
0.048[m] |
|
2. 比較陸地上GNSS RTK和測深雷射掃描的數值: |
|
|
取樣數 |
127 |
|
平均∆H |
0.072[m] |
|
標準差∆H |
0.063[m] |
|
3. 比較水中GNSS RTK和測深雷射掃描的數值: |
|
|
取樣數 |
128 |
|
平均∆H |
0.064[m] |
|
標準差∆H |
0.022[m] |
表 1:使用不同測量技術獲得的數值比較
小結
在淺水區進行測深測量特別具有挑戰性,因為使用傳統測量技術會遇到許多問題。淺水區深度基本上無法使用多波束測深儀。因為測深儀的掃描帶會很窄,並且測深儀本身可能因進入淺水區或碰到海底物體而受損。
因此,唯一的替代方法是使用單波束測深儀和GNSS RTK接收儀進行剖面測量。不幸的是,這種方法的效率非常低,且其成果僅限於剖面內的深度資訊。在測試區域中,完成陸地和水域剖面測量所需的時間為40個工時。相比之下,使用空載測深光達VQ-880-G II的飛行時間僅約為1個工時。
空載測深光達技術的一個主要缺點是其使用限制:必須具備合適的大氣和環境條件。雲層覆蓋、波浪作用、風向和風速、水體清澈度都是關鍵因素。掃描過程必須在海底上方有機和無機物污染最少的時刻進行。
儘管如此,測深雷射掃描展示了在相對較短的時間內獲得淺水區域最完整影像的能力。這使得建立一個包含完整資訊的可靠海底模型成為可能。其成果不僅可以更容易地識別水中的物體,還可以追蹤由海洋活動引起的變化。
先導計畫獲得的正向成果無疑推進了對使用空載光達測深技術監測整個波羅的海海岸的招標計畫。因此,GISPRO SA已經有機會為斯塞新海事辦公室(2023年)和格丁尼亞海事辦公室(2024年)測繪整個海岸線。在工作進行中,除了令人滿意的沿海幾何和海底測繪外,甚至還能夠掃描到一些沉船。其中一個例子是位於沃林島(Wolin Island)海岸附近的混凝土船Karl Finsterwalder的沉船。
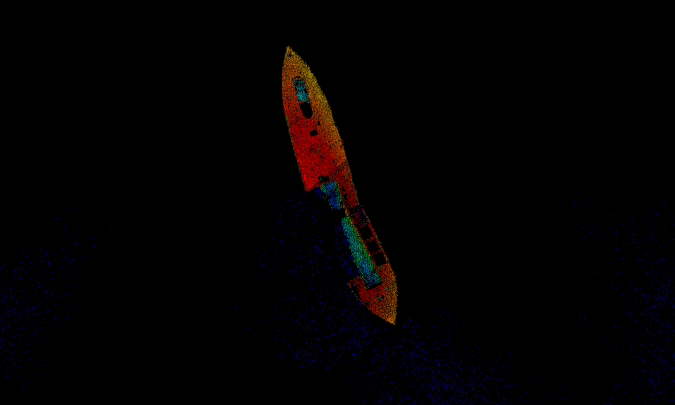
圖 4-在空載測深光達資料中獲取到的混凝土船Karl Finsterwalder的沉船。(圖片來源:GISPRO SA)
圖 1的來源是名為《Przegląd współczesnych metod satelitarnych i lotniczych wykorzystywanych w mapowaniu dna morskiego》(回顧現代衛星和航空方法用於海底測繪)的文章,該文章原文為波蘭語。
閱讀更多
平均年度沙奇深度(Average annual Secchi depths)